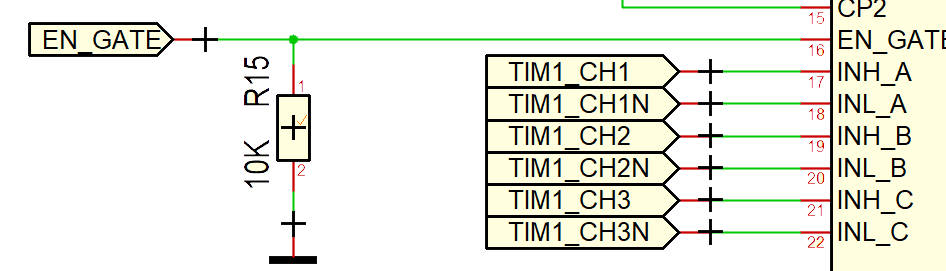
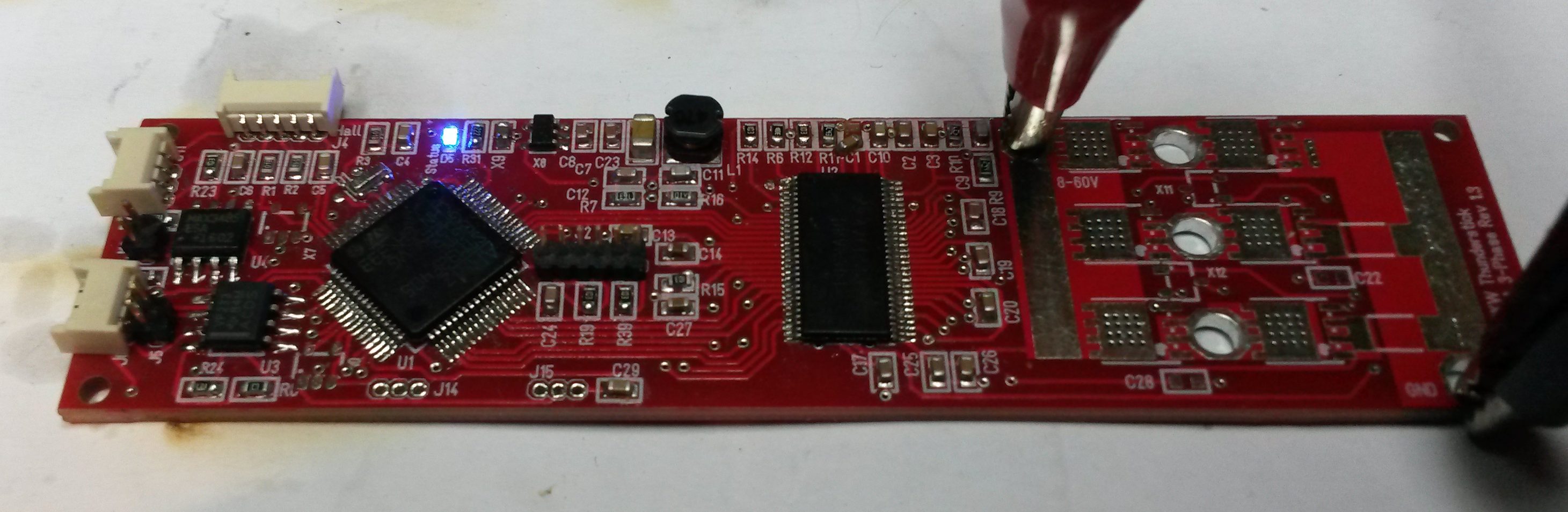
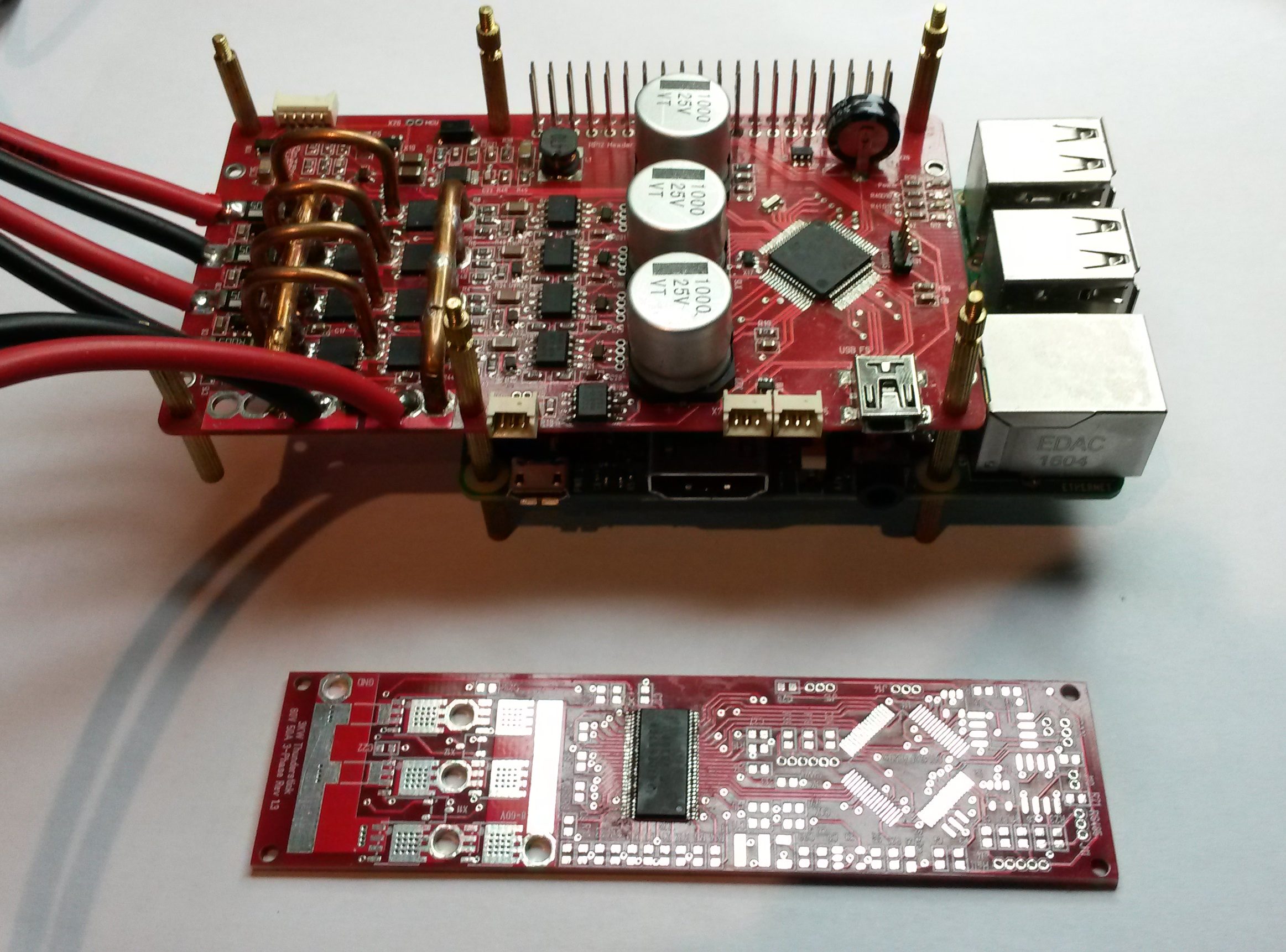
Testing Thunderstick I started to notice strange behavior as I increased MCU frequency – in fact I am unable to tick the MCU above 84Mhz powered from the DRV8301 Buck Converter. This indicate that I have interference between the Buck Converter and the MCU on higher frequencies. To prove my case I powered the board feeding it 5V directly and it suddenly works well on 168Mhz.
I have little experience with Buck Converters, but I assume I need to add a filter to separate frequencies. The challenge is that I have very little space to do so, so this will be a bit tricky to wire up and test. I could also try to change the value if the coil in the buck converter + I need to check datasheet for what frequency it uses.
It is also a bit tricky that I don’t have a Oscilloscope capable of seeing frequencies above 100Mhz, so I need to try to fix this blind. Adding a 10uH coil before the 3.3V regulator will probably do the trick, but it is a bit annoying as I should not need to do this – I might need to experiment with coils and capacitance on the Buck Converter to see if I can get rid of the high frequency ripple.
What is most likely happening here is that the Buck Converter generate high frequency ripple out as it generate my 5V power. If this is sufficient big and in the right frequency it will disturb the MCU as we try to achieve higher frequencies – well, for me to test and learn 🙂