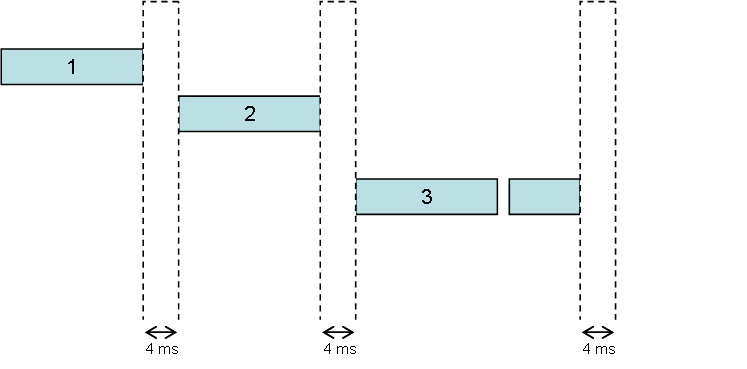
One of the challenges with classic RS485 is that we use Master/Slave protocol that introduce a lot of waiting latency. We simply use most of the bandwith waiting. I want to try implementing a timing protocol as illustrated below:
This is only an idea at present, but I believe it is doable with a STM32 So I will do a proof of concept for it next. The objective is to implement a multi-master protocol where all devices can be active without killing bandwidth or CPU usage.
The concept is quite simple. We listen on the port and as soon as we detect a 4ms silence we start sending using a scheme where device 2 send after 4ms, device 3 after 5 etc. I assume I need 2-3 ms to differ devices and a way to detect collisions? We will see.