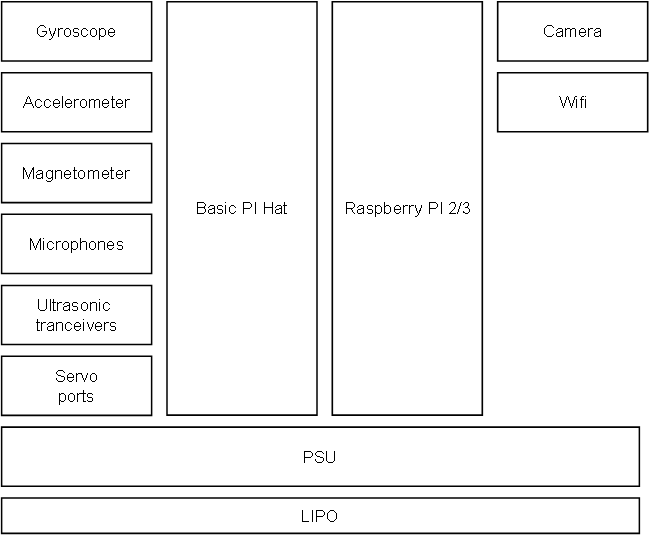
The block diagram above outline the control system for the Spider Robot. The prototype was a mock up to test the basics of the concept and to proceed I want to make some changes:
- We need a proper CPU and I see no reason not to add in a Raspberry PI to execute AI logic. The servos and sensors are easily controlled by one of our BasicPI Hat’s, which leave us to design a PSU. I like the current 11.1V LIPO at 1.5AH. It should give several hours of operation.
- We need to add sensors. A few ultrasonic transceivers will enable us to check distance to surrounding objects, a MPU9255 adds Magnetometer, Accelerometer and Gyroscope, a couple of microphones adds hearing etc. Raspberry PI have digital camera option with possibilities for optical detection options. The rest is easily added to the IO processor.
- We need to work on the mechanics around the legs. I need a stronger servo on the inner arm and a better wiring solution to the legs. The problems detected was partly the servo breaking after continuous usage, plastic parts not taking the beating and wires worn out.
My first plan was to use a Raspberry PI Zero, but using a Raspberry PI 3 makes a lot more sense in this case. This adds the Wifi option directly.