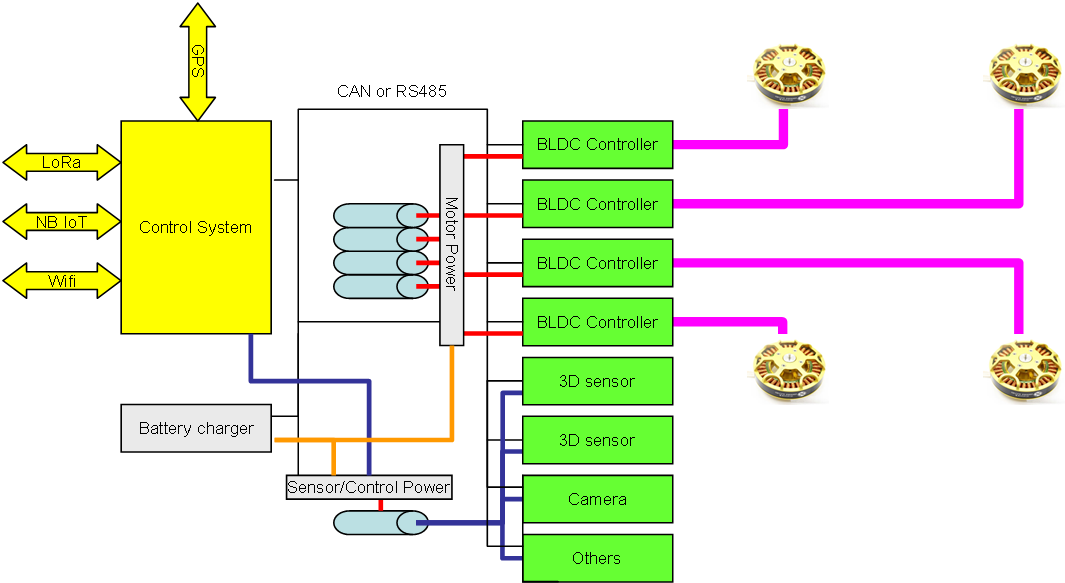
I want to make a larger plane using drone technology and the drawing above illustrate a generic control system with 4 thrusters. In this case I suggest 4 main motors because I want to lift a large drone in a simple frame to test thrusters and control logic. But, the illustration is generic in nature.
Control System consist of a Raspberry PI A+ and a LoRa + NB-IoT Hat + XPortHub. I will connect to the remote control using Wifi, LoRa or NB-IoT in that sequence. NB-IoT require subscription, but has nation wide range. This means we can send the drone on long distance flights. In this case I use the powerfully Raspberry PI for AI logic while I leave motors and actuators to specialized MCU’s in a distributed control system. This is an excellent test case for all the projects I have done on this site.
To communicate with actuators and sensors I can basically scale up as per need. The plan is to use CAN (or RS485) for a wired telemetry interface. In fact I might need 2 for redundancy. Camera(s) will be a Raspberry PI Zero W with Camera attached. I will need to find or make a solution here to attach camera and a wired or wireless connection. I try to avoid wireless connections inside the drone due to noise and radio density.
2 separate battery banks with a battery charger and PSU’s are needed. Motor batteries and motor power feed is kept separate from control system and sensor PSU.
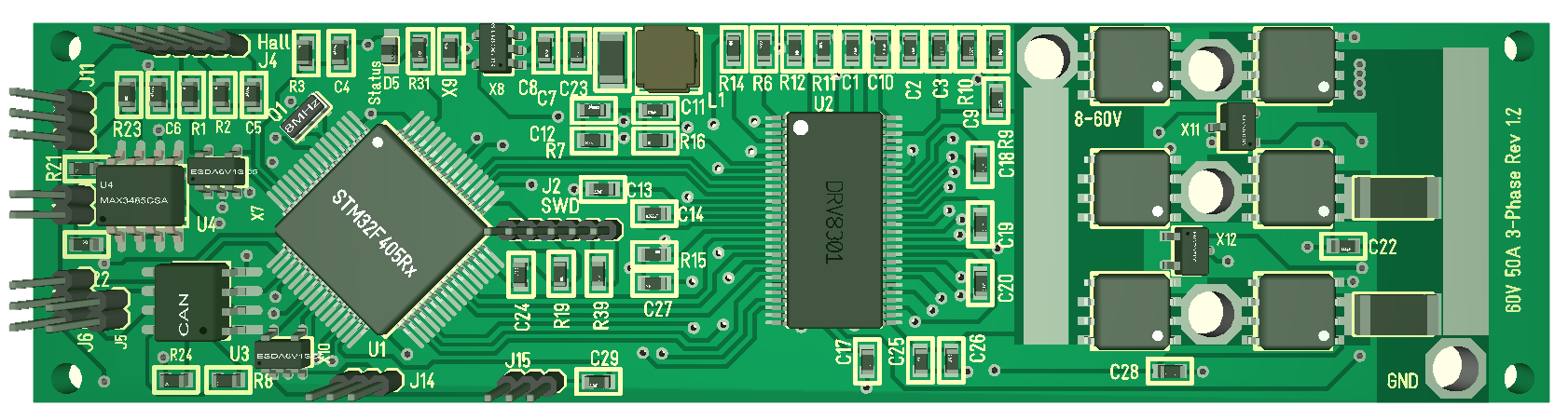
BLDC Controlles will be the 3KW 3-phase ones. I can use the Steam Punk Controller as well, but I think we need the smaller space on this one. We need a separate BLDC Controller per thruster.
3D Sensors are basically a variety of 3 axis sensors that is used to detect the drones position in 3D. This together with the GPS can locate the drone in 2D as well.
The advantage with this control system is that I can scale up/down as I please. Compared to a All-In-One system this adds a few concerns and complexity, but I am not targeting ultra small drones.
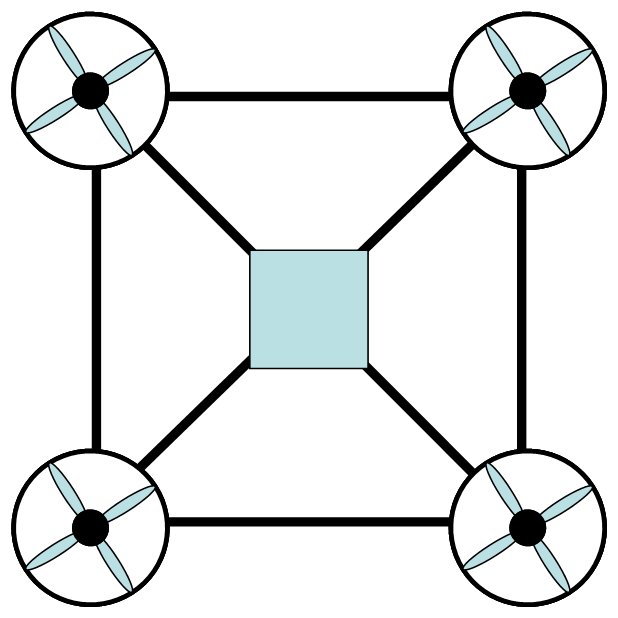
My first objective is a frame like the one below. This is just an early test to get a few meters above ground and get the vertical take off and landing working.
The sketch below is of the actual drone. I add a 5th forward thruster and ordinary wings. The objective is to get more flight distance and time than I can achieve with a classic drone and still have vertical take off and landing. I will build this mainly with 50cm carbon fiber rods jointed to get som size. The thruster will need to be some 3-Phase motor with a frame I need to make. The motors and batteries are probably the cost driver here. These drawing are also only illustrations. I am not an expert in aero-dynamics, and I have some concerns. But, well – that is where reality hits in + I am armed with a forrest of friends that can assist me.
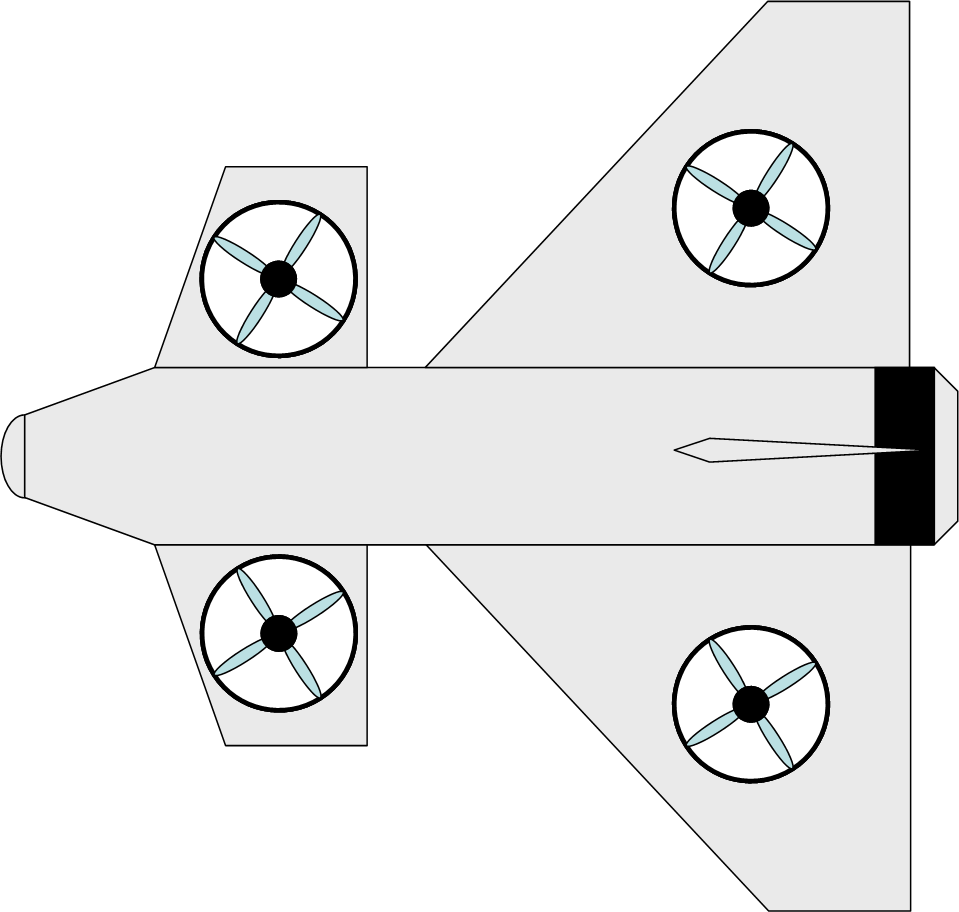
The main concern I have is (1) mechanical design and (2) cost. The show-stopper for the project is however battery capacity that will limit flight time and usability. But, that will improve in the years to follow.