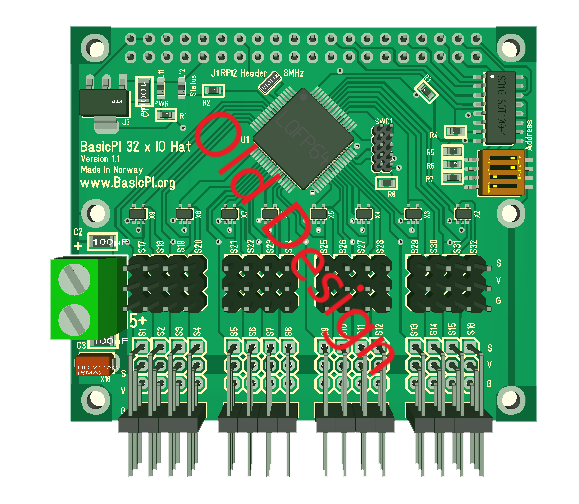
This is the 3D of a new 1.1 that I never ordered. The only difference from 1.0 is the TVS diods and a few mechanical adjustments. I will remove the address logic at top right, replace the SWD, replace the power connector and move the inner 16 IO ports to the edges while I also add CAN and USB.
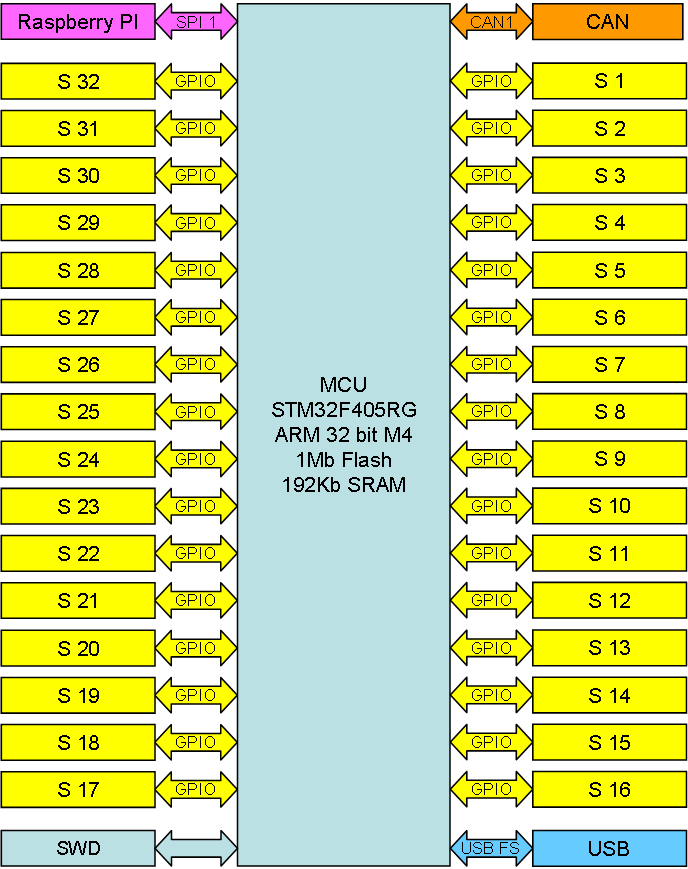
These block diagrams are simple, but they are part of how I like to document the modules, so I like maintaining them because they illustrate the Inventory of the Boards.
One remaining decision is where to put the CAN port because they should be at the same position on all boards since this is the main control bus. At present top left corner is a candidate, but I need to make that the same on all Hat’s. The RPI Header is not a pri 1 on these Hat’s. I will leave the RPI header on if possible. It also make sense having one side with no connectors out.
As for the 32 x IO board I think I have covered that before. These are GPIO signals exposed “as is” with a TVS diode to give the MCU some protection. They uses a 5V design, but I will allow a separate 5V so that we can feed Servo’s from a different PSU source. That alone provide a huge protection from misbehaving Servo’s and it allows Servo Power to be 12 V if needed.
I probably need a weeks time re-routing this board. At present I plan to do a lot of these boards before x-mas, but let’s see.
This board have extra mounting holes for Raspberry PI Zero W. I am not bothered about these because ESP32 privide a low cost Wifi alternative. I don’t want a Linux board for the sake of having a Linux board. But, Raspberry PI 3 A/B+ with it’s 4 x 64 bit MCU, Camera and HMI capabilities makes a lot of sense if you need to dig into some of it’s capabilities.
I also have a ESP32 version of this board that in many ways are superior because you get ports and Wifi on the same board. I have to upgrade that as well and I wonder if I should follow the same RPI format – the board is about the same size, just a bit different. As great as ESP32 is it can however not really compete with a F405 on IO capabilities. One Word about ESP32 is that I need to check out it’s CAN capabilities before I do this.
Stay tuned!