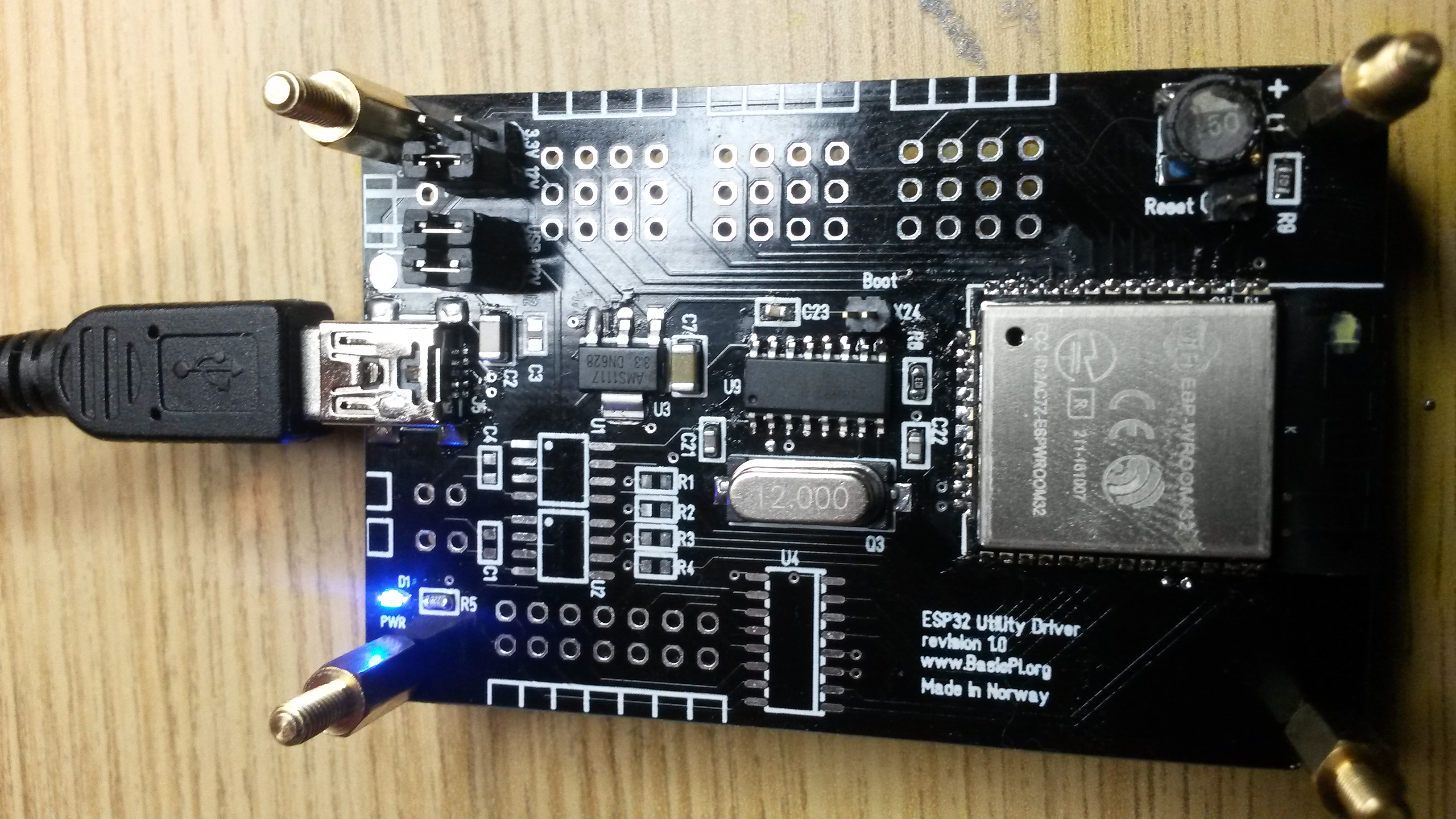
Finally received the PCB for the Train Control System and the Utility Driver. I decided to solder the Utility driver because that has the CG340G USB connection. Soldered the PSU & CG340 was straight up. I am actually impressed by CH340G as it always work and connect to Windows. Soldering ESP32 was straight forward, but first attempt to get it working failed.

A quick look at schematics and swapping RX/TX did however do the job. A trick is to use Boot first time you load from Arduino IDE and it also help having a working reference like a breakout board.
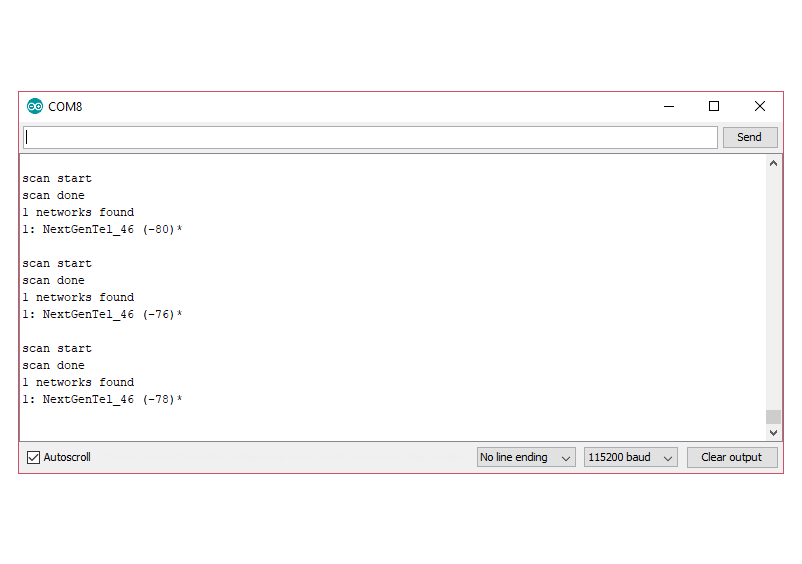
Finally the Wifi scan works from my utility driver. I will solder up the rest of the circuit and start programming servo’s tomorrow. My first usage of this will be on my 12 legged robot.
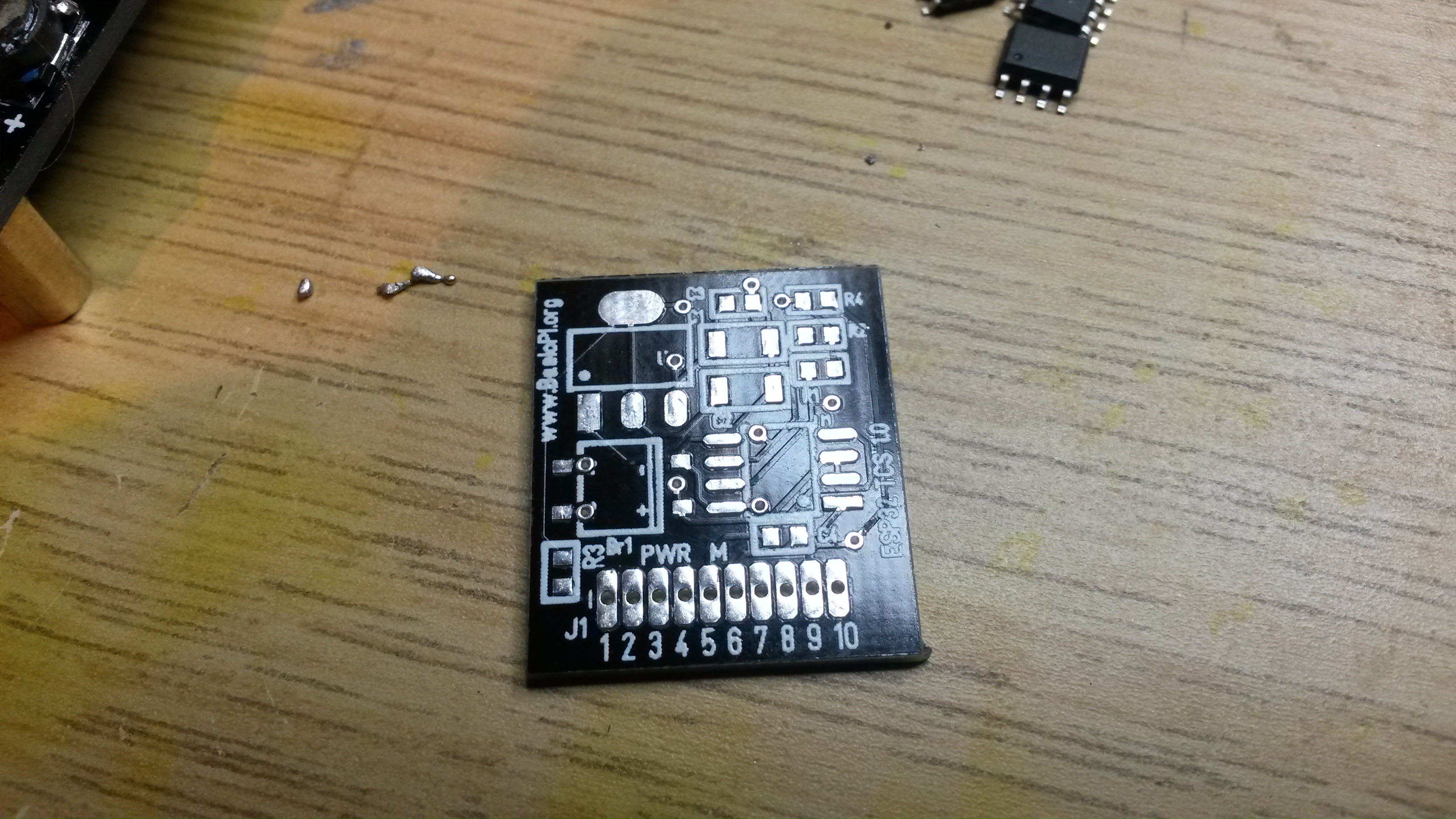
These two last pictures show the Train Control System. We can play with that later. Actually I need to get my act together and buy a test track. As said my ambitions are limited to a track around the x-mas tree – ok maybe 2,3,4 or 5 tracks 🙂