I initally hoped to test rev 1.0 of this Controller back in february, but as often happens with hobby plans – they get delayed because of real life. I am still waiting for the PCB’s on 1.0, but I am already starting the planning for rev 1.1.
- Testing the design on 11.1V battery.
- Testing power and heat under full load.
- Testing spike tolerance.
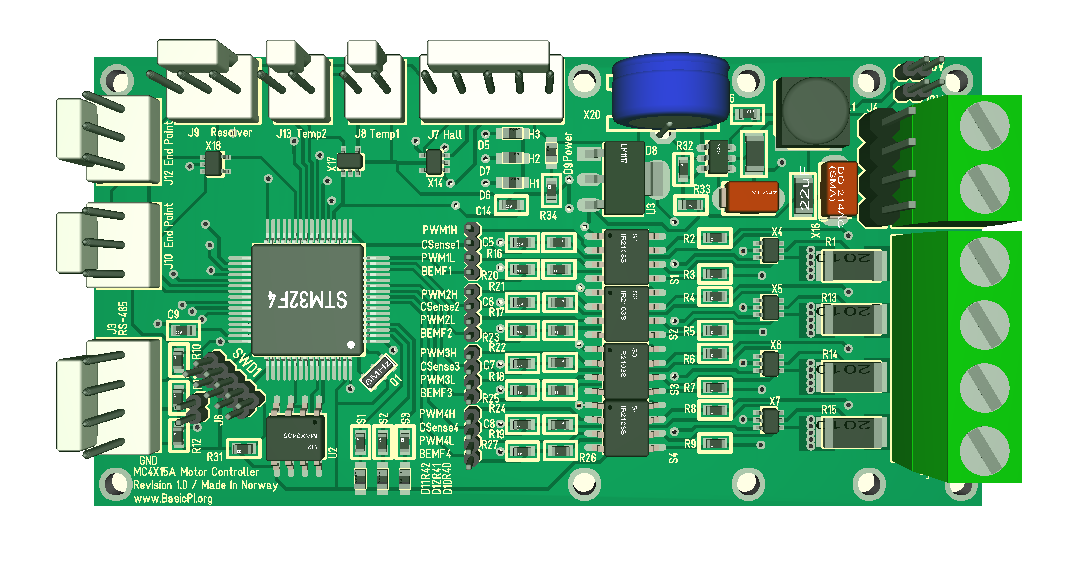
- I am not fully happy with connectors, their size and location. Need to evaluate if we can improve this.
- SWD needs to be moved/turned a little.
- RS485 should be upgraded to galvanic isolated version. This is a challenge as I need physical space.
- I am considering tilting the MCU 45 degrees left because a lot of PCB lanes would then be Shorter. It could save some Space.
I was considering 48V and more current, but the truth is that we then start moving towards specialized needs that is better handed as such due to the effects involved.
CAN or Ethernet is still an option. Despite having advocated CAN and written CAN stacks in the past – I am not a fan of CAN. RSX is better for many reasons. I would love Ethernet, but the truth is Ethernet wiring and need for switches is a drawback in robotics. I will consider an add-on option for communications, but I am actually happy with RSX because it is robust, flexible and easy. For now I assume I have to wait 1-2 weeks 🙁