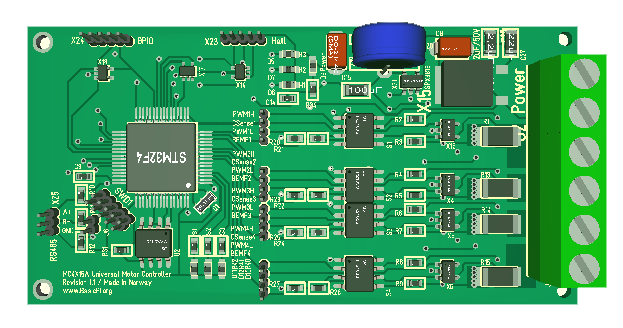
The first draft of rev 1.1 of 30V 20A Motor Driver. The differences are that I replaced the DC/DC with a 78M12 (linear regulator) for simplicity and cost, replaced INA210 with INA193/INA194/INA195, added 2 temperature sensor on-board and replaced connectors with te smaller JST Micro connectors. I also combined 3 connectors to one. I also removed all the extra drill holes as I will use a heat sink the same size as the PCB and attach caps on top.
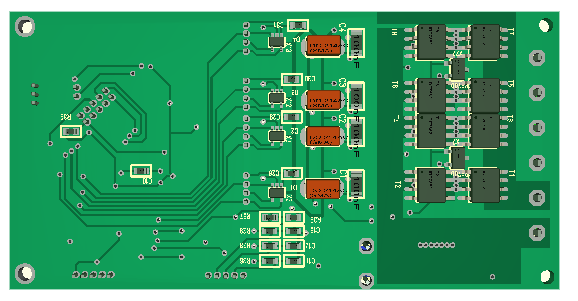
I had to space out the 4 channels to get the temp sensors in between. I still have some work on this 80x40mm board, but I am a bit surprised over how much space I suddenly have. The original design target for this was 15A, but I am increasing that to 20A and I will widen the main power lanes to support a heavier total load.
I am not finished with this, but I am quite happy with the draft so far. I still lack support for the 1-2000uF capacitor that need to go on top because heat-sink is on bottom.
Just to remind everyone
- 4 separate Half H-Bridge channels that can deliver 30V /20A. Many of the MOSFET’s are capable of more, but the PCB will overheat at some point. The previous design had no challenge with 10, so lets see.
- 4 high side current sensors
- 4 BEMF sensors
- 2 temperature sensors in between MOSFET’s
- Separate Supercap to protect and keep MCU alike through power cuts.
- Hall sensors w/Leds
- End point/Resolver input
- RS485
- Powerfully STM32F405RG
- Design is 600W (30V x 20A) with 360W (24V x 15A) as very realistic.
Applications
- Bike Motor Driver
- DC Motors
- Solenoids
- Stepper Motors
- 3-Phase Motors
I like this controller due to it’s smaller size and simplicity compared to the 60V x 50A one. 20A out on PCB lanes might be stretching it a bit – we just have to test and see. And yes the PSU is 36V, but some of the MOSFET’s are 30V hence this limit. I probably could decrease the length to 70mm, but I don’t see the point + the heat-sinks I plan to use are ready made on 80x40mm making assembly very easy.
The only thing I lack is the faster SPI bus and interface to other boards. I can easily widen the board to 55mm and add RPI header and drill holes, but I am thinking more in the direction of adding a specialized adapter just so I can get easy access to LoRa, GPS, NB-IOT, Wifi etc.