It’s time to code up the ESP32 Utility Driver. I am not that found of Arduino IDE, but it works and I like the wire library concept and how it simplify things. A Servo port is a signal that send a 50Hz pulse. The technique I suggest is a bit-banger where we loop as fast as we can checking pulse length. We set up the 12 signals in a table, start them at the same time and then iterate as fast as we can closing them at the proper time to get a correct pulse length.
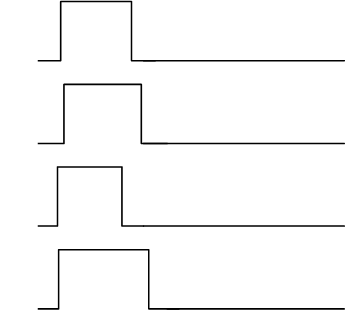
The alternative is to use an interrupt. This could work, but we would get a resolution of 1ms (1000/sec) or 0.1ms(10000/sec) max. Any interrupt faster than that would use to much CPU time. Another technique would be to bit-bang signal 1, then signal 2 etc. this is what the classic Arduino library does. The technique I suggest gives a much higher resolution as we iterate and check much faster that we can use interrupts.
This would have worked well with a single core, but as we have a dual core we can allocate this task to one core and I expect something like 10uS accuracy or 100Khz sampling if we use this as data sampler.
We have 21 IO ports to maintain in an iteration:
- 12 Servo or IO ports
- 2 (4) H-Bridge signals
- 7 PWM signals
ESP32 is perfect for this job as we can use 1 core for this purpose while the second core handle the Wifi and easyIPC that I will return to later.