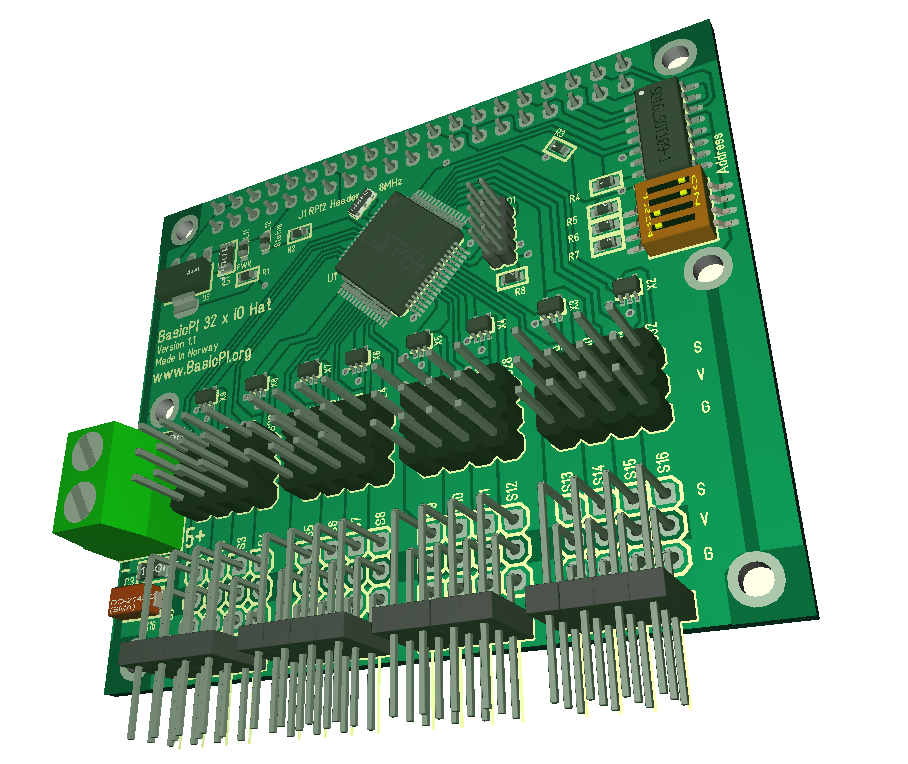
New 3D model showing the right angle connectors and the updated “Servo” that now is renamed to 32 x IO Hat. I have done some mechanical changes and added a lot of protection electronics. As mentioned earlier this is my test ground for the VM and each channel have multiple capabilities – hence the “IO” rather than Servo.
- 32 channel Servo Controller
- 32 channel digital in
- 32 channel digital out
- 32 channel low resolution PWM
- 2 channel analogue out
- 12 channel analogue in
- or any combination of the above
I have three Hat’s that will stack nicely
- 16/32 channel IO (shown here)
- 8x H-Bridge + 8 x IO
- 5 port RS-485/CAN
I do in addition have the 7 x Stepper, but I am not happy with the connectors on that one. The 28BYJ-48 stepper motors comes with a 5-pin connector that is nice and exist as right-angle, but I can only manage 3 of these in stacked position – To be honest I am considering ditching this Hat design.
As we move forward I will add more hat’s and more distributed sensors and controllers to allow larger and more complex systems to be created. I want to create a few robots + I want to automate my home for the fun of it. But, all of this is worthless without an easier way to apply Distributed logic so I will continue to dig into the PLAIN concept for now.