A classic RS485 2-wire network consist of a Master and multiple Slaves. The master query each slave ensuring that only one device communicate at the time. This makes it an easy network to implement, but the bandwidth usage is low due to all the waiting time. The second issue is that a device needing to send an even/alarm simply have to wait.
Some protocols like Profibus offer a solution to this by using a timing scheme. If device #1 has been silent for n ms device #2 will attempt to communicate etc. This type of schemes have usually required better hardware integration and been unreliable with classic UART/USART ports.
Testing on STM32 will however show that we easily can run a Systick at 1000 times per second giving us a response time of 1ms. We can even run it at 10,000 timer per second with 10% MCU load. This offer an opportunity to respond to events with 1ms accuracy. If we in addition create our serial port so we always will read input we can as well verify if what we send is what we received and detect collisions on the bus.
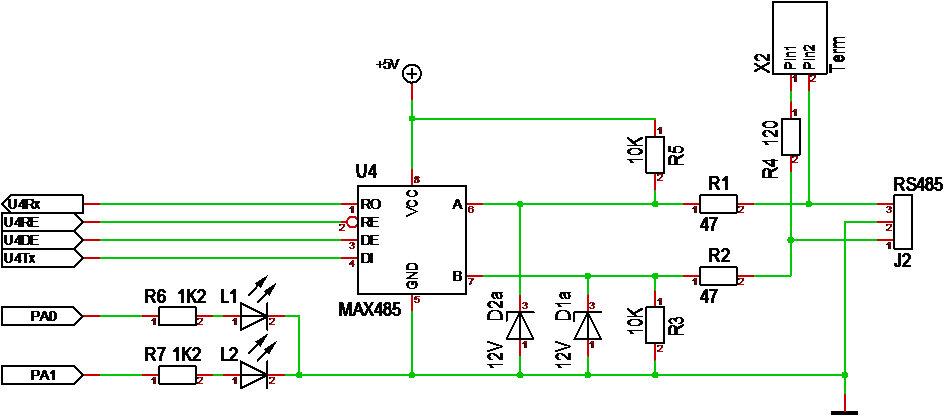
The circuit above shows the modified interface where we control both Read Enable (RE) and Send Enale (DE) from the MCU rather than combining them. The rest of the circuit is rather classic RS485. R4 is the 120 Ohm terminator, R5 and R3 are the bias resistors. R1 and R2 are just shortcut protection and can be replaced with a 0 ohm resistor. D1 and D2 are 12V protection on the line and is optional. L1 and L2 are just leds used to indicate if we are sending/receiving.
The interesting bit about this is that UART/USART interfaces are more commonly available than CAN is and RS485 is easier to wire and get working. If we can overcome the drawbacks of using RS485 we would benefit from a network with the same advantages of CAN, but none of the disadvantages. This will not be doable on all UART’s out there, but I believe STM32 and similar have sufficient juice to manage this without investing into more expensive hardware or compromising MCU availability for other tasks.