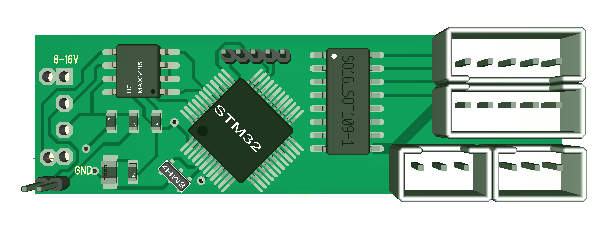
This board uses a LQFP48 because I needed more pins and it extended the size to 50 x 15 mm to get everything in. It contains 2 x Stepper Motor Drivers and 2 x end point connections. This can operate 2 x 5-wire or 4-wire stepper motors. I have not decided on MCU yet. I used STM32F103CB on the schematics, but I know that STM32F303Cx can be used and I will check if the same is the case for the M0 series in LQFP48 package. All of these MCU’s are an overkill for what we do here.
I target 28BYJ-48 or similar stepper motors that can operate on < 0.5A current. Having two steppers rather than one is because it often is required to operate two steppers in parallel. I use two ULN2003 drivers mounted back to back on each side, meaning I have 6 spare PWM signals and plenty of spare pins on the MCU. I only need to expand the PCB Space for Connectors to have a full 3-axis driver. This is just an early draft where I focused on size only, so will see where I go next.
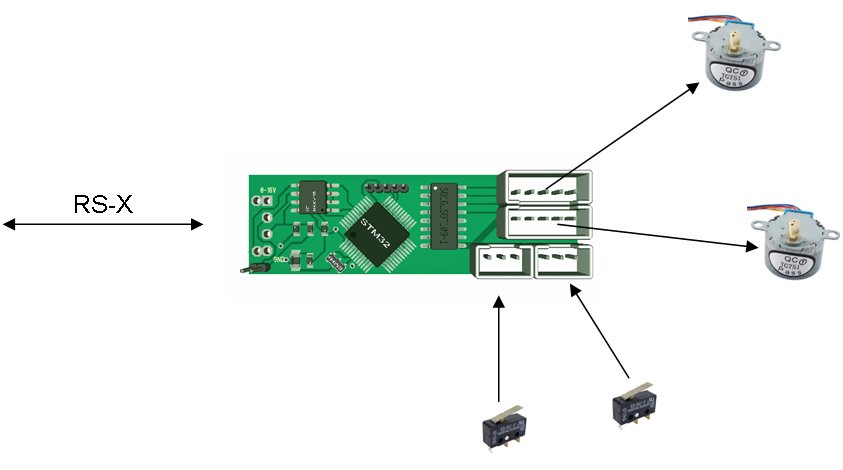
The beauty with the RS-X based micro modules is that you can just add on modules by connecting them to the network and locate them as an extension of cabling on the robot or in your house etc. We still need a more intelligent unit like a Raspberry PI in centre, but it expands our scalability to easily build more complex systems.