One of my main concerns about IRF7862 is that I target 15A while 17A is their range at 25 Degrees. Pulse drain is 170A and using PWM we need to take a bit care because 15A on 50% PWM duty is actually 30A in PWM peak currents. If you manage 15A with 10% PWM duty you would actually be up in 150A in PWM peak currents.
15A continuous is much nicer on the MOSFET than 15A in PWM because as we switch on/off we also loose energy. IRF7862 is very fast with 19ns rise time and 11ns fall time, it is actually one of the faster MOSFET’s I have seen.
You also need to realize that current limiters measure current per phase. A = V/R. And with R=1Ohm I basically run 24A in pulses. The current measured on the PSU is an average based on pulse width. The way you measure current also means you need to apply a pulse before you can measure, so you will always be behind the 1st pulse.
In a proper BLDC design you trip using an analogue detector that is much, much faster than any MCU. But, in SW we implement this as “damage current”. For MC4X24V15A I planned a 100A damage current on the phases, 15A damage limit in average all phases together. Actual current limit for user should be dynamic below 15A.
I am very happy with IRF7862 and what I have seen. I have after all been testing a dodgy batch where a majority did not even work. But, this math would be easier if I used MOSFET’s with 2X this capacity. So I am considering using IRFH5300. This would be a “32A design” limited to 15A to avoid the MOSFET’s from becoming the weakest link.
Moving on to a 100A design that is in many ways easier because we need more space and special wiring for 100A. With 100A I can forget about classic PCB wiring and we need thick cobber wires to support the PCB. I have 3 candidates for MOSFET’s. It is some insane designs around, but we can’t focus on small size alone here + we need to focus on current paths and heat dissipation under load. You also need to read and design with worst case scenarios. Some simple math:
| MOSFET |
RDS mOhm |
10A Effect |
15A Effect |
50A Effect |
100A Effect |
| IRF7862 |
3.3 |
0.33 W |
0.74 W |
– |
– |
| IRFH5300 |
1.4 |
0.14 W |
0.32 W |
3.5 W |
|
| IRFS3107 |
3 |
0.3 W |
0.68 W |
7.5 W |
30 W |
| IRFP4368 |
1.85 |
0.19 W |
0.41 W |
4.6 W |
18.5 W |
| IRFS7530-7P |
1.4 |
0.14W |
0.32 W |
3.5 W |
14 W |
These numbers indicate what you can expect as heating effect on the MOSFET at different currents. These numbers are based on RDS and very ideal. They do not take into account loss as we switch. A fast MOSFET will loose less than a slow MOSFET since the MOSFET is less efficient as it switch.
Looking at 10A we can state that any of the MOSFET should manage as we are in 0.33W at max. But, at 15A we see 0.75W on IRF7862 while IRFH5300 still would be at 0.32W. Looking at 100A we can see that 2 of the MOSFET’s are ca 50% below the 3rd. So using IRFS3107 here would require a lot more heat-sink than for IRFS7530-7P.
IRFS3107-7P is however not as obvious as you think as this package is down at the PCB. IRFP4368 is a TO-247AC Package enabling us to keep some distance to the PCB and the rest of the electronics to make it easier to deal with heat. But, I will test both.
Using the table above you can also see why the VESC (Benjamin Vedder’s BLDC) using IRFS7530-7P can manage 50A without heat-sink, but only can manage a few sec with 240A. 240A would actually be 80W compared to 3.5W at 50A. 14 or 18W is possible to get rid off, but it is actually far more than you think it is. So how can we achieve even higher currents?
Some of the small ESC designs achieve 30A or more by using 2-3 MOSFET’s in parallel. And if you look at the numbers you see that 50A is 3.5W while 100A is 14W, so if we used 4 x MOSFET’s we should achieve 200A and still be at 3.5W per MOSFET. That would be a monster with up to 24 MOSFET’s, but we should in theory be delivering 12KW without needing heat-sinks.
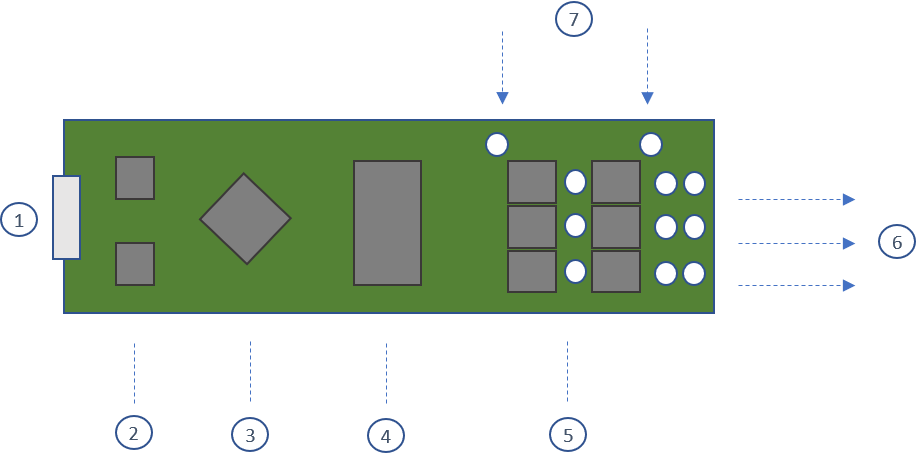
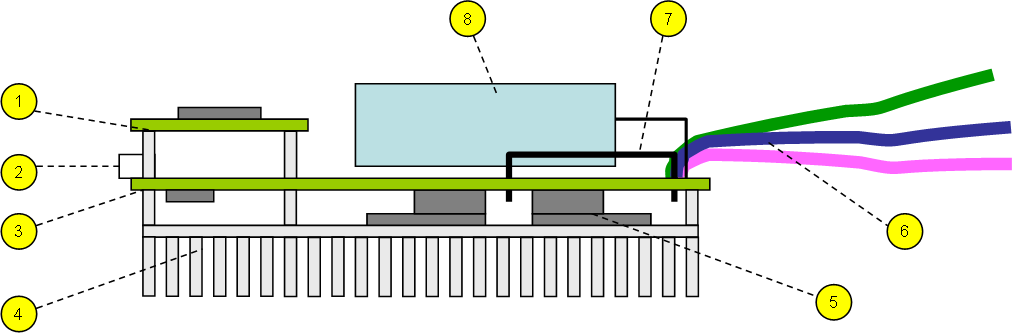
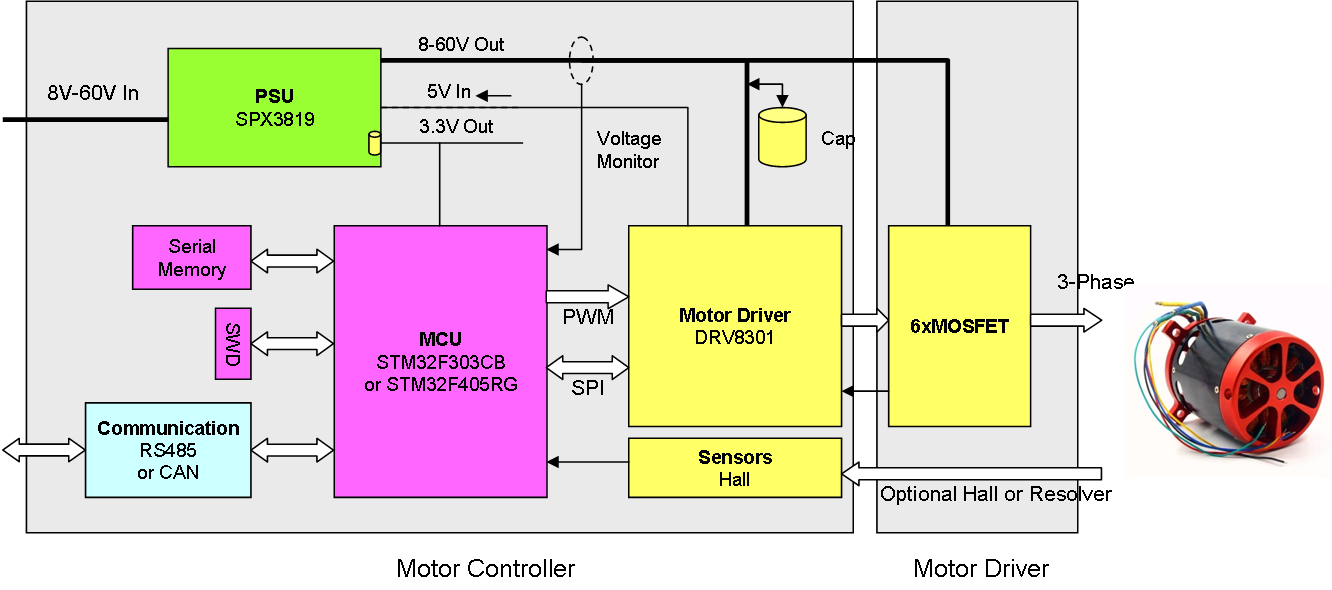
MC3P60V100A will consist of two modules, one controller and one driver. The purpose is to reuse the same controller on various driver designs and MOSFET’s to experiment. I can always make them one board later for project optimization. Testing of this will be a challenge, but let’s worry about larger drivers and higher currents later.
Thank you for Reading!