The 40V or 30V or 26V – ouch limits have always annoyed me, so with new MOSFET’s, current sensors and PSU I change to 60V design. Making Space for SOP Advance I can always use SOP and 30V MOSFET’s anyway.
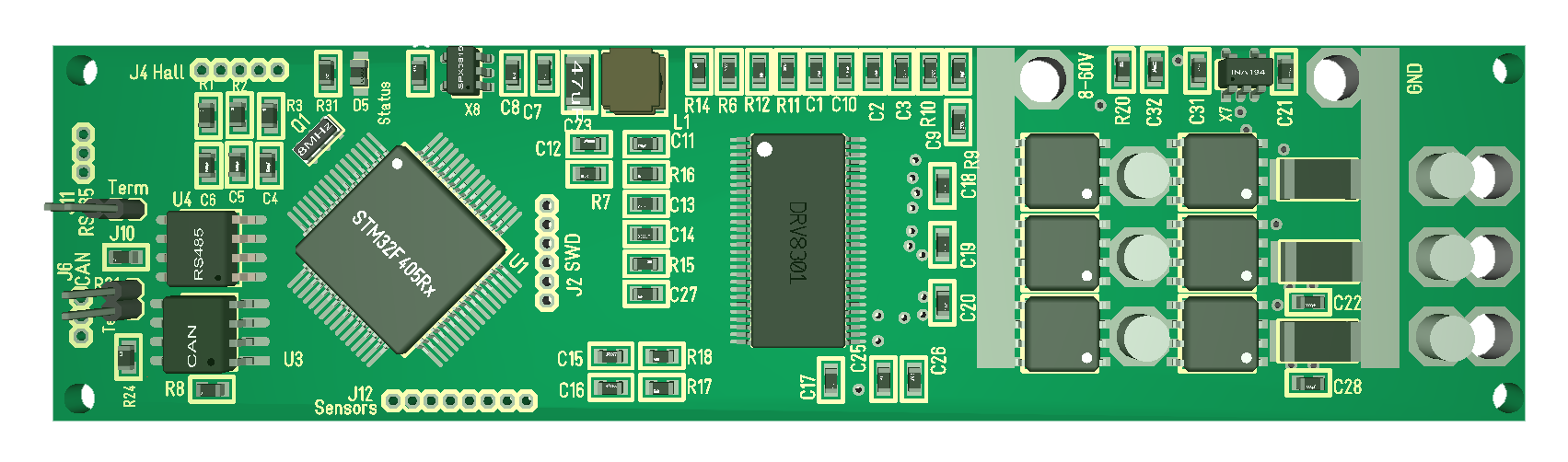
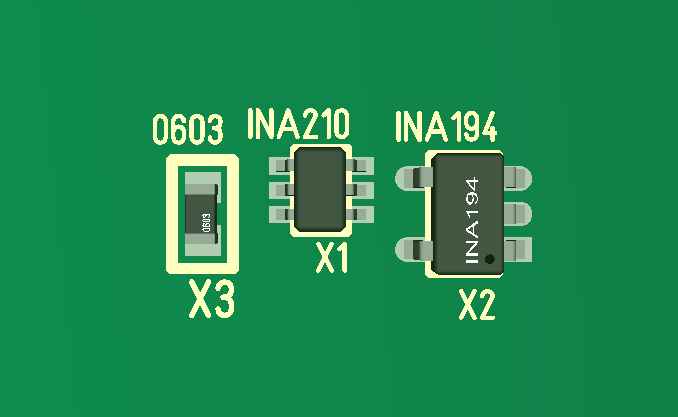
I finally found several temperature sensors in SOT23 package, so I ordered 2 different ones to test. SOT23 with no passive components means I should be able to sneak these in between the MOSFET’s – add 2 on MC4X.. and 1 one MC3P..
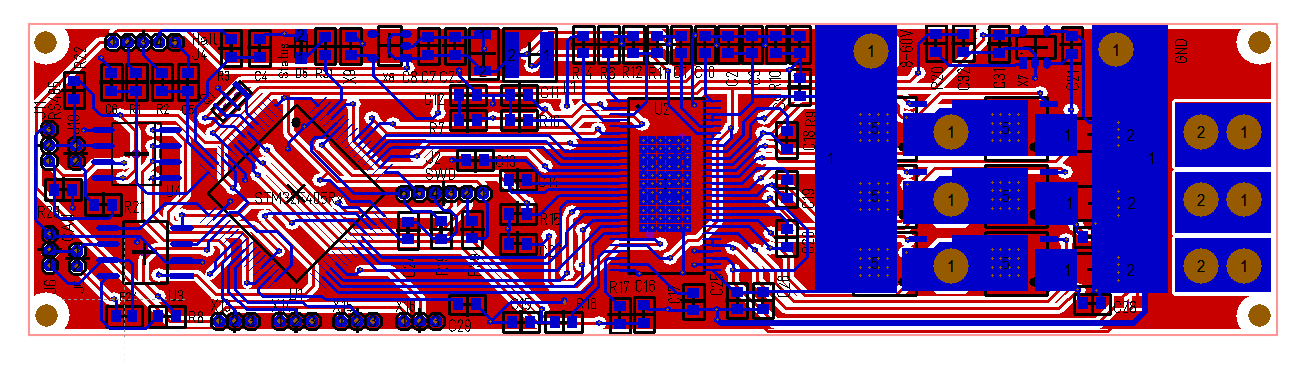
Testing MC4X I realize that I probably need to re-route revision 1.1 from scratch. I need a minimum of 1mm extra space between channels for SOP Advance package options + I want JST connectors on each channel rather than 1.27 pitch headers. I need space for INA194 as well as the temperature sensors. I also want 1000uF on the controller directly etc.
On the present controller I tried for a more narrow board and ended up adding space. Truth is that MC3P end up being a smaller design with components only on top side – I don’t think I can or want top-side only on MC4X, but I would like 100 x 40mm format due to the availability of heat-sink’s in that size. So if I include capacitors on that size it will be good.
I am not going to bother with higher currents on this solution as it would require to much. I got the 3P design for higher currents and 3-phase motors even if I realize that my first routing here also need to be modified.
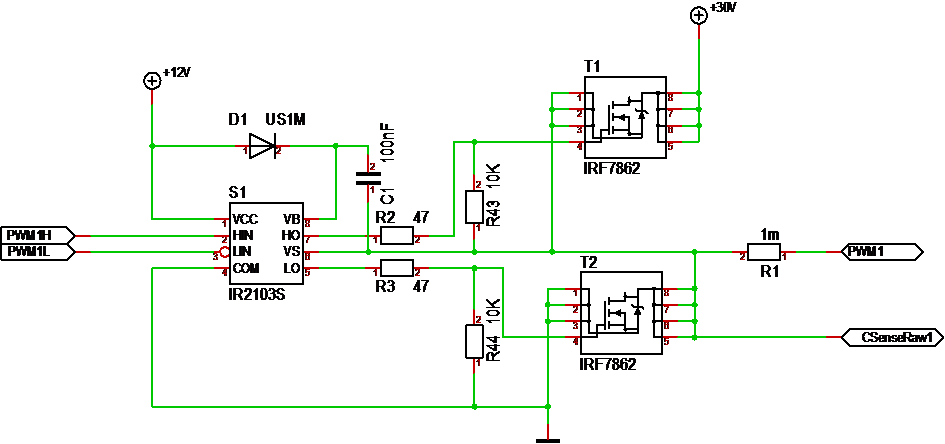
It will be a bit of work before I order either MC4X or MC3P as both needs changes, but it is worth it. I am actually impressed with MC4X testing so far despite a few set-backs. I expected PCB lanes to be a problem and not dodgy MOSFET’s, so things are looking very good for a 15A design. With new MOSFET’s I might very well upgrade current ratings, but that is not an objective right now. I will also be using 3X-, 4X- and 3P-Controller as terminology from here. Writing the full names are a bit confusing and at present I only want to continue with 3 controllers. Others do small, insane 3-phase drivers better than me, so I focus on actuator Controllers. I can never compete With the smallest size using 2-layers anyway – but, it is real fun to see what I can achieve.